
ФЭА / Электроэнергетика / Регулирование момента и тока двигателей.
(автор - student, добавлено - 29-12-2013, 12:07)
Регулирование момента и тока двигателей. При формировании необходимого графика движения ИО РМ возникает необходимость обеспечения требуемого ускорения замедления. Согласно уравнению движения электропривода при поступательном и вращательном движениях: при поступательном движении: ∑F=m*dv/dt =m*a при вращательном движении: ∑М=J*dw/dt =J*
необходимый график можно сформулировать за счёт регулирования прикладываемого к ИО РМ со стороны электропривода момента или усилия. В некоторых технологических процессах требуется такое движение, при котором на ИО РМ создавалось бы необходимое натяжение в обрабатываемом изделии или материале, которое обеспечивается с помощью ЭП за счёт регулирования создаваемого им момента или усилия. Ограничение момента в ЭП необходимо также в аварийных режимах для предотвращения поломки ЭД или механической передачи при внезапном предотвращении движения ИО РМ. регулирование тока или момента двигателя необходимо также для обеспечения нормальной работы самих электродвигателей. Необходимость ограничения тока в ЭП возникает и в случаях пуска мощных двигателей как постоянного, так и переменного тока, когда возникают большие пусковые токи, приводящие к недопустимому снижению напряжения питающей сети. Для анализа способов изменения момента двигателя используют формулу определения момента: М=I*k*Ф Исходя из данного выражения, изменение момента может происходить за счёт изменения тока или магнитного потока. Наиболее часто применяются на практике способы ограничения тока при регулировании момента. Регулирование тока производится системой управления за счёт изменения подводимого к двигателю напряжения, с помощью преобразуемой электрической энергии или включением в цепь двигателя добавочных резисторов. Однако регулирования тока и момента могут осуществляться только в переходных режимах. Для анализа возможности регулирования тока используется электромеханическая и механическая характеристика двигателя, которая для двигателей постоянного тока независимого возбуждения определяется зависимостью скорости от тока якоря при постоянном магнитном потоке. Для АД механическая характеристика представляет собой зависимость скорости от тока статора или ротора. Для СД зависимость скорости от тока статора.
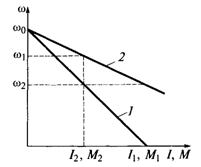 Характеристика двигателя при ограничении тока и момента с помощью резисторов: 2 – без резистора в цепи якоря
Для примера показаны электромеханическая и механическая характеристики двигателя постоянного тока независимого возбуждения, которые позволяют регулировать ток и момент двигателя при пуске с помощью добавочного резистора в цепи якоря. Резистор включается в цепь якоря на период пуска(1), при достижении двигателем скорости ω2 резистор закорачивается с помощью коммутационных аппаратов и двигатель переходит на естественную характеристику. Таким образом, регулирование тока и момента производится ступенчато и для повышения точности показателей регулирования необходимо использовать возможно большее число характеристик, так как ток и момент будут изменяться меньших пределах. Данный способ регулирования характеризуется простотой в реализации, но отличается малой точностью.
Регулирования положения. В некоторых технологических процессах ряда рабочих машин исполнительным органам требуется перемещения их в заданную точку пространства и фиксирования с заданной точностью. Перемещение и установка исполнительных органов в заданное положение называется позиционированием, а обеспечивающий эти операции, ЭП – позиционным. Позиционирование обеспечивается соответствующим регулированием положения вала двигателя и может осуществляться по двум вариантам. В случае невысокой точности показателей к позиционированию оно осуществляется с помощью путевых или конечных выключателей. Выключатели устанавливаются в заданных позициях и при подходе к ним исполнительных органов производят отключение двигателя и остановку исполнительного органа. При необходимости высокой точности позиционирования формируется оптимальный график угла поворота вала двигателя во времени.
1 – график момента 2 – график скорости 3 – график угла поворота вала двигателя Для получения данного графика необходимо знать графики момента двигателя и скорости при разгоне движения с установившейся скоростью и торможением. Совокупность этих трёх графиков позволяет реализовать оптимальное позиционирование по быстродействию при котором обеспечивается высокая точность и малое время позиционирования. Такое позиционирование реализуется в замкнутой системе «преобразователь-двигатель» с помощью обратных связей по току, скорости и положению. Однако, при небольших участках перемещения, участок с установившейся скоростью может отсутствовать на графике |
|